Robot_Arm
The Green Arm
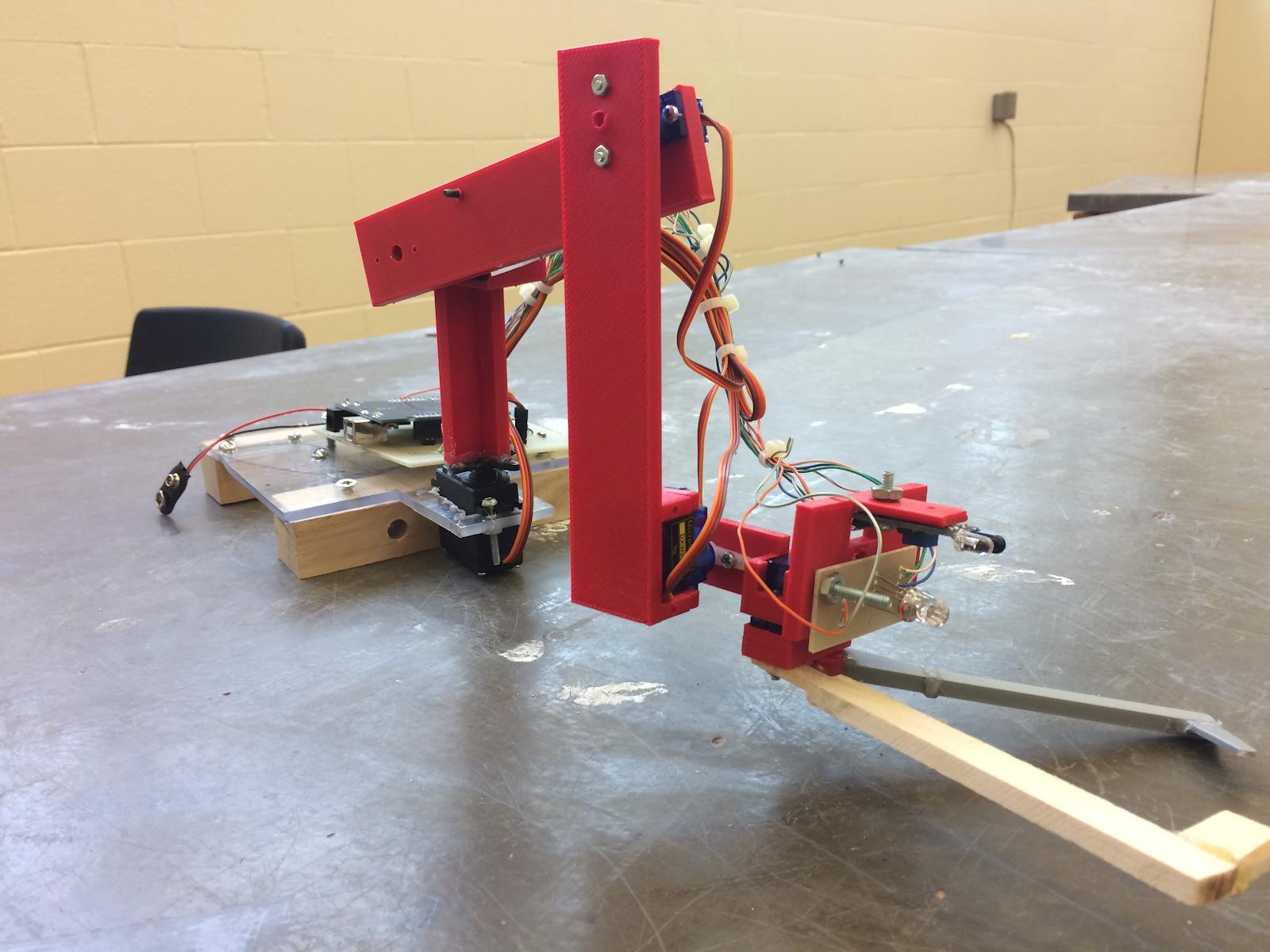
It is a 5-servo robotic arm, powered by an Arduino with a colour sensor and detectors, to intelligently locate a coloured barrel, pick it up and configure its colour, and place it onto its designated zone.
A few key features to point out are the colour sensor and design.
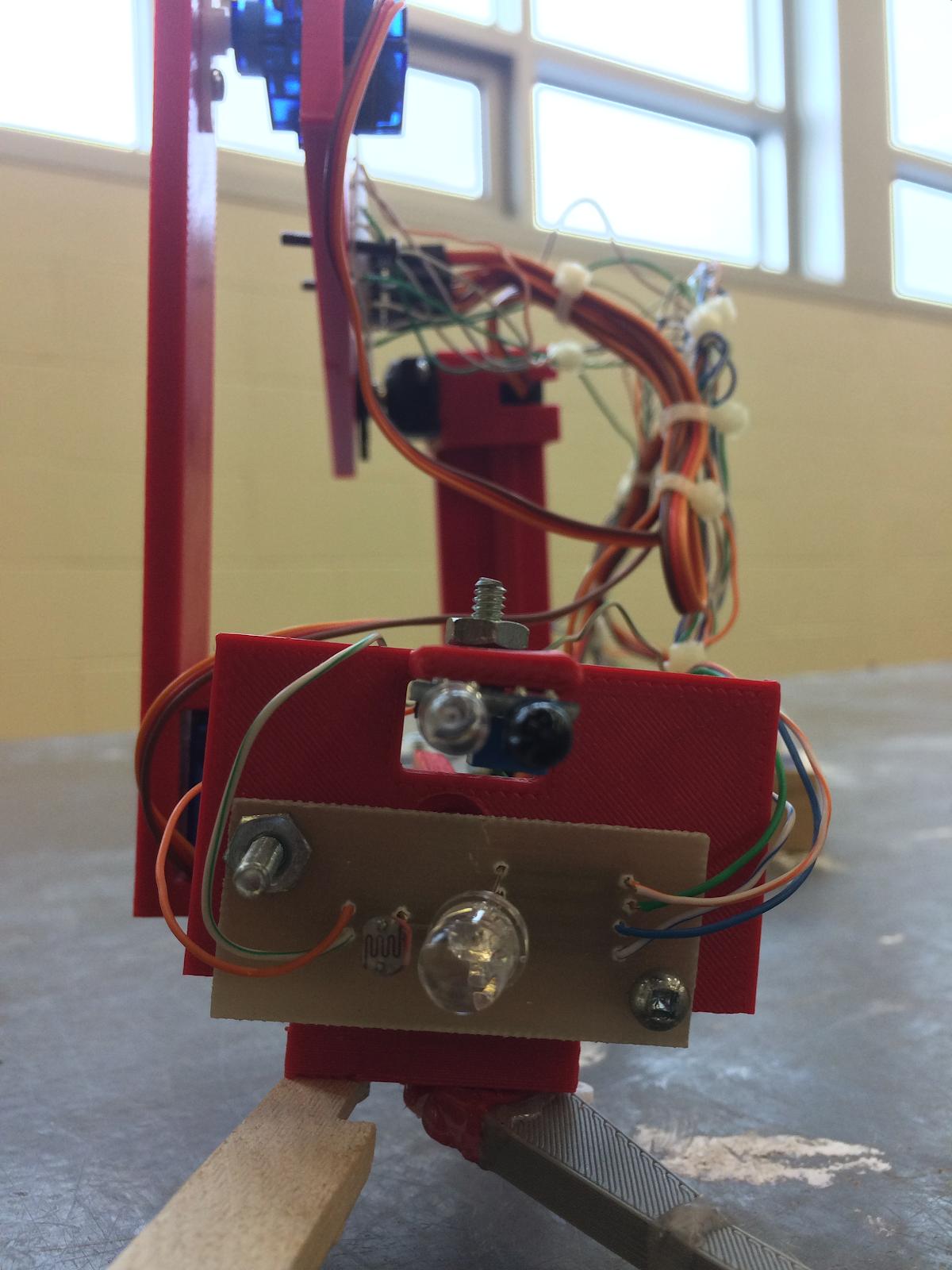
- The project contained a simple colour sensor that uses a CdS photocell and RGB diode to gather information on different wavelengths reflected by the surface of each barrel when red, blue, and green were shown on the part. I coded an algorithm to gather data over a set number of samples and determine the most prominent colour seen. This elminated the need of a prebuilt colour sensor, reducing the project cost by 20\%
- The project was designed using AutoCAD online 3D modelling software, and all parts of the base model were printed to assemble the robot. The arm was able to rotate about a semi circle, reach out and grab a barell
Closeup View of Colour Sensor
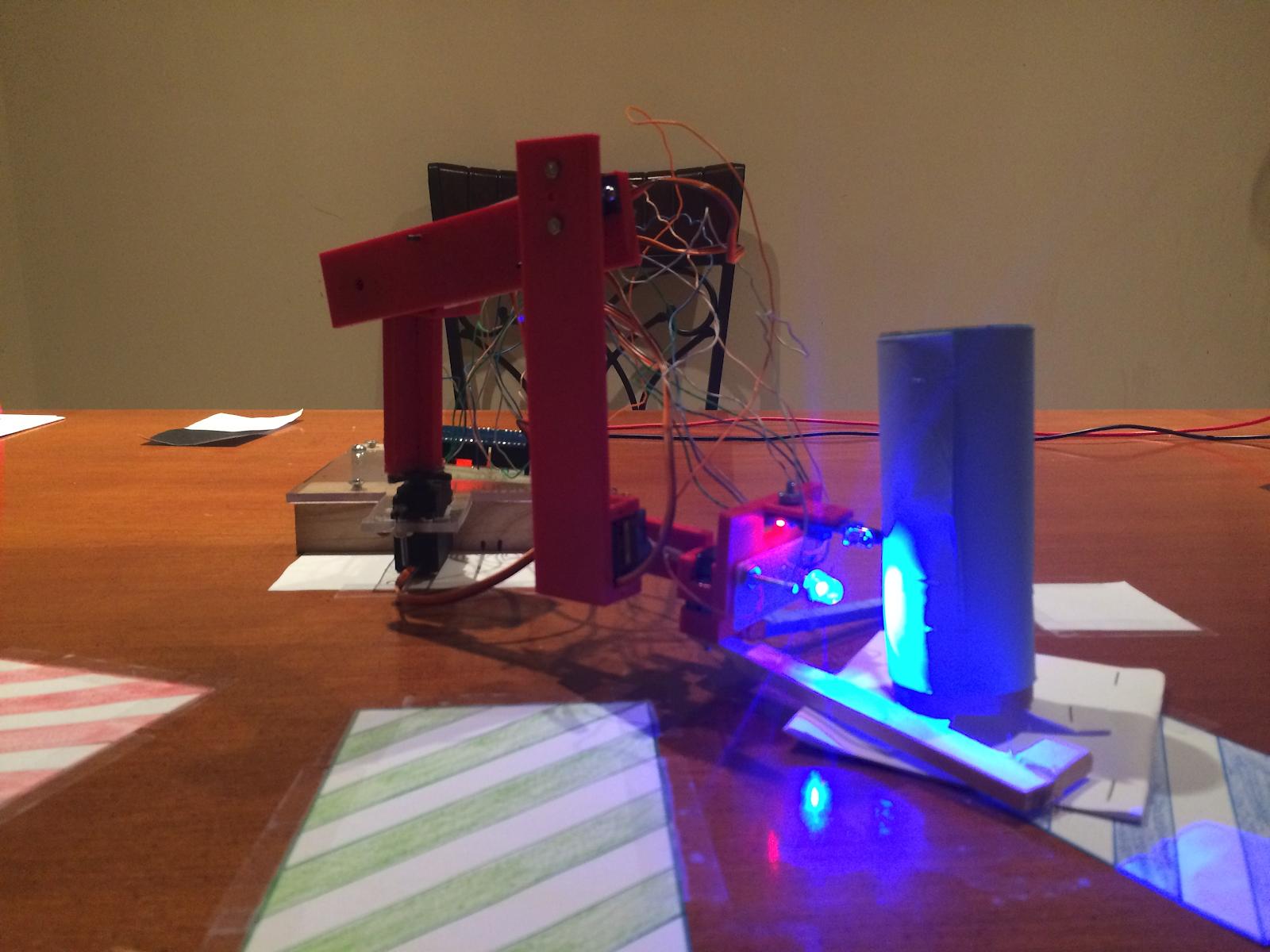
Functioning Arm
The code and project writeup can be found in the project writeup
Note that this project was inspired by IBM’s Green Arm Challenge. It has nothing to do with the colour of the robot :)